
|
The University of Alabama
|
Lab Work Time LapseWith almost 40 team members and two separate competitions to prepare for, work in the Astrobotics lab in Hardaway Hall is almost constant for most of the school year. This video shows a time lapse of a normal day in the lab as team members prepare an electrical box for one of the robots as well as continue work on the test rig for the bucket ladder for the Robotic Mining robot.
|
|
2016 NASA RMC Robot
Full System Test- April 28, 2016After just another couple weeks of extremely hard work, we performed another set of full system tests! The buckets do an incredible job of throwing the sand! The offload is great, and we expect the regolith to move even better on the belt. All in all, this was a much better test than before, though we did discover more motor and control problems, particularly with the position control of the digging head.
|
|
|
|
Full System Operational Demo- April 15, 2016According to Rule 32 of the 2016 NASA RMC Rules and Rubrics, teams must submit a video "documenting...their mining robot in operation for at least one full cycle of operations (one full cycle of includes excavation and depositing material) by April 22, 2016 at 12:00 p.m. (noon) eastern time". We got to film this video last week during our first full system test!
|
Base
|
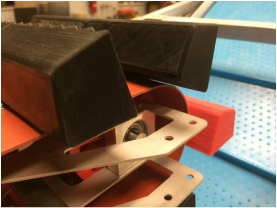
Modularity has been a key part of Alabama Astrobotics RMC designs since the beginning. Each RMC robot has been built with a multipurpose drive train that runs completely independently of whatever module is currently attached. The picture to the right is of the RMC 2016 drive base during fabrication. A custom, hollow steel frame is used for strength, with optimized cutouts to save weight without compromising the structure, as well as to minimize build up of sand or regolith on the frame members.
|

|
|
|
Drive Base Test- February 26, 2016This was the first test of our 2016 RMC base! While the sand in our practice arena does not simulate the competition regolith very closely, it does provide a very valuable worst-case scenario for testing. We created extreme mounds and craters in the obstacle area to aggressively test the limits of the controls, clearance, and durability of the base. We were thrilled to prove that the PID controllers worked beautifully and no significant issues with the structure were found!
|
|
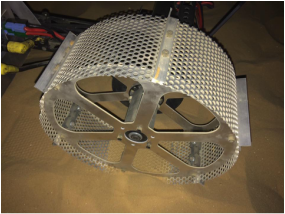
The RMC wheels have been redesigned every year as we have gained more experience in working with the regolith. Over the years we have used both rubber and metal wheels and experimented with different types of tread and grousers. We have also tested designs for flex wheels to add built-in suspension, but have maintained a rigid design for competition since the flex compromised the strength of the wheels and only resulted in warping. The 2016 wheel design is the first to use perforated aluminum.
EDIT: After further testing, we have discovered that while the perforations do help keep the robot from getting bogged down while turning, they sink too much while the robot is still. This causes problems with our offloading height and we have returned to a solid outer rim. |
|
Module
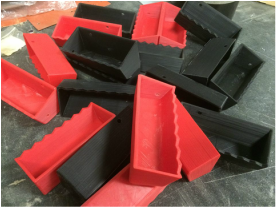
The 2016 RMC Module is a dual conveyor belt system. The digging head conveyor, or the "bucket ladder", extends from the front of the robot to dig and then retracts while the robot traverses the pit area. The second conveyor is the offloading belt which carries the regolith to the top edge of the robot where it falls off into the collection bin when the robot is ready to offload. While the general design is similar to our 2015 robot, it has been redesigned with key improvements such as 3D printed buckets designed to throw more of the regolith into the bin, increased digging depth, and a custom offloading belt which moves the regolith more effectively.
|
Additive manufacturing is a major current research topic because of the flexibility of design it allows. In the space industry, it has the additional benefit of making parts far more easily replaceable. The International Space Station already has a 3D printer used to print certain parts rather than having to wait for an expensive resupply mission. Our printed buckets are also significantly lighter than our previous metal buckets.
|
|
|

|
|
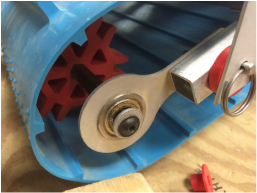
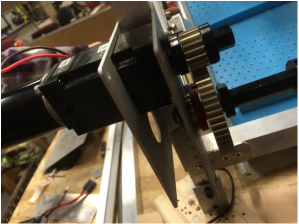
Offloading Belt: Our offloading conveyor is a custom belt we chose primarily because of its durability and the built-in textured surface. The rest of the digging head structure is made of aluminum and 3D printed parts including the red pulleys for the belt.
|
|
The module has two separate motors which each control one of the conveyors. Like everything else, the motors were selected by weighing various factors including their size, weight, and the necessary torque to drive the belts. In the case of the digging head, the motor must also be strong enough to counteract the digging head's tendency to pull forward into the dirt as it digs.
|
|
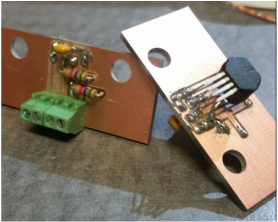
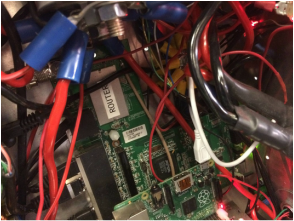
Electronics
|
|
Team Interviews
Electrical Subsystem Co-Lead |
Base Mechanical Lead |
Module Lead |
|
More 2016 Robotic Mining daily updates on Facebook and Twitter!
2016 Sponsors



|


|